
Pieter Abbeel — lider robot learning, UC Berkeley, BAIR, uczenie przez doświadczenie.
Pieter Abbeel to jeden z głównych architektów robot learning — podejścia, w którym robot nie jest programowany, lecz uczy się przez doświadczenie.
Jego prace wyznaczają przejście od automatyzacji do systemów, które rozwijają kompetencje poprzez interakcję, obserwację i eksplorację świata.
🧭 Karta Postaci – Atlas 8B
Pieter Abbeel
– Robot, który uczy się świata
🧬 Kim jest Pieter Abbeel
Pieter Abbeel – architekt robot learning i jeden z głównych twórców podejścia, w którym robot uczy się poprzez doświadczenie, obserwację i eksplorację.
Profesor na University of California, Berkeley, dyrektor Berkeley Robot Learning Lab oraz współdyrektor Berkeley Artificial Intelligence Research. Jego prace wyznaczają kierunek przejścia od programowania zachowań do uczenia kompetencji.

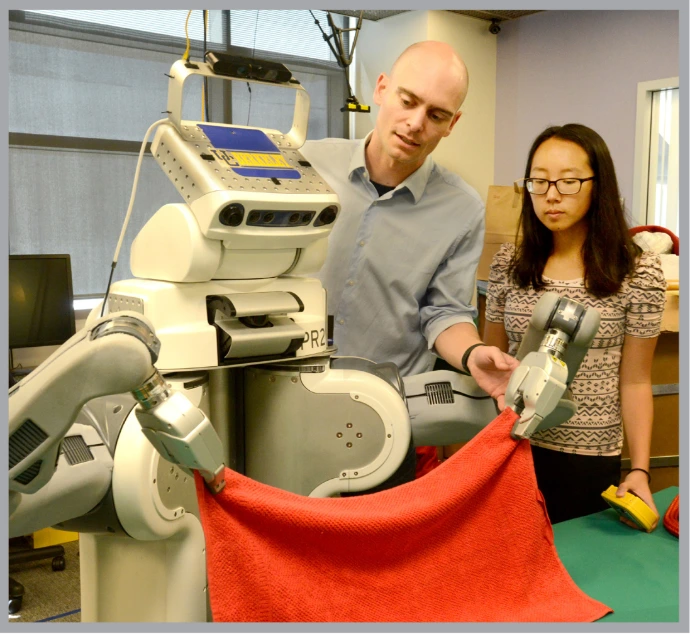
Robot uczący się od człowieka i środowiska
🧠 OBSZAR WPŁYWU
Robot learning / embodied AI / uczenie przez doświadczenie
Abbeel rozwija podejście, w którym robot nie jest zaprogramowany krok po kroku, lecz nabywa umiejętności poprzez interakcję ze światem — podobnie jak człowiek lub zwierzę.
⚙️ KLUCZOWE KONCEPCJE
Deep Reinforcement Learning
Uczenie poprzez nagrody i błędy — eksploracja przestrzeni działań.
Imitation Learning (Uczenie przez demonstrację)
Robot uczy się, obserwując człowieka lub inne systemy.
Meta-learning (Learning to Learn)
System uczy się, jak szybciej uczyć się nowych zadań.
Transfer Learning
Przenoszenie wiedzy między różnymi zadaniami i środowiskami.
Robot Learning at Scale
Trenowanie na dużych zbiorach doświadczeń, często w symulacji.
🧪 NAJWAŻNIEJSZE WKŁADY
Rozwój nowoczesnych metod uczenia robotów manipulacji i kontroli
Integracja deep learningu z robotyką fizyczną
Badania nad generalizacją umiejętności (robot nie tylko wykonuje jedno zadanie, ale uczy się całych klas działań)
Współtworzenie środowiska badawczego, które kształtuje globalny kierunek robot learning
🏛 INSTYTUCJE I EKOSYSTEM
UC Berkeley
Berkeley Robot Learning Lab
BAIR
Covariant – współzałożyciel (wdrożenia w logistyce i automatyzacji)
Covariant
Covariant to amerykańska firma zajmująca się robotyką i sztuczną inteligencją, specjalizująca się w tworzeniu systemów robotycznych zdolnych do samodzielnego uczenia się i adaptacji. Jej technologie umożliwiają automatyzację zadań w magazynach i łańcuchach dostaw, wcześniej uznawanych za zbyt złożone dla robotów.
Kluczowe fakty
Założona: 2017
Siedziba główna: Emeryville, Kalifornia, USA
Założyciele: Peter Chen, Pieter Abbeel, Rocky Duan, Tianhao Zhang
Specjalizacja: Robotyka wspomagana sztuczną inteligencją (AI Robotics)
Finansowanie: Ponad 200 mln USD z inwestycji venture capital
Technologia i produkt
Covariant rozwija „Covariant Brain” — platformę AI, która umożliwia robotom percepcję, planowanie i manipulację przedmiotami w dynamicznych środowiskach. System uczy się z doświadczenia, korzystając z metod uczenia głębokiego i uczenia przez wzmacnianie, dzięki czemu może automatycznie dostosowywać się do nowych typów produktów lub zadań bez konieczności programowania ręcznego.
Zastosowania przemysłowe
Technologie Covariant są wykorzystywane głównie w centrach logistycznych i magazynach e-commerce. Roboty firmy potrafią sortować, kompletować i pakować różnorodne produkty, co pozwala klientom, takim jak ABB, Ocado czy Knapp, zwiększać wydajność operacji i ograniczać niedobory siły roboczej.
Wpływ i pozycja rynkowa
Covariant jest uznawana za lidera w dziedzinie tzw. „AI-powered robotics”, konkurując z firmami takimi jak Boston Dynamics i Amazon Robotics. Jej podejście, polegające na wykorzystaniu wspólnej platformy AI do sterowania wieloma robotami w różnych lokalizacjach, przyspiesza wdrażanie autonomicznej automatyzacji w skali globalnej.
Perspektywy rozwoju
Firma koncentruje się na rozszerzaniu swojego ekosystemu o nowe funkcje percepcji i manipulacji oraz integrację z szerszymi systemami zarządzania łańcuchem dostaw. Covariant postrzegana jest jako kluczowy gracz w kierunku pełnej automatyzacji logistyki i przemysłu lekkiego.
Pieter Abbeel
 Pieter Abbeel to belgijski informatyk i profesor na University of California, Berkeley, specjalizujący się w uczeniu maszynowym i robotyce. Jest jednym z czołowych badaczy w dziedzinie uczenia przez wzmacnianie i uczenia imitacyjnego oraz dyrektorem Berkeley Robot Learning Lab i współdyrektorem Berkeley Artificial Intelligence Research Lab.
Pieter Abbeel to belgijski informatyk i profesor na University of California, Berkeley, specjalizujący się w uczeniu maszynowym i robotyce. Jest jednym z czołowych badaczy w dziedzinie uczenia przez wzmacnianie i uczenia imitacyjnego oraz dyrektorem Berkeley Robot Learning Lab i współdyrektorem Berkeley Artificial Intelligence Research Lab.
Kluczowe fakty
Urodzony: 1970-te, Belgia
Wykształcenie: Ph.D. z informatyki, Stanford University (2008)
Stanowisko: Profesor, UC Berkeley (od 2008)
Firmy: Współzałożyciel Covariant i Gradescope
Nagrody: PECASE, NSF CAREER, TR35, IEEE Fellow
Kariera naukowa i badania
 Abbeel prowadzi badania nad tworzeniem systemów sztucznej inteligencji zdolnych do samodzielnego uczenia się nowych umiejętności. Jego prace obejmują meta-learning („uczenie się uczenia”), uczenie przez wzmacnianie i uczenie nienadzorowane. Jego laboratorium opracowało roboty potrafiące wykonywać złożone czynności, jak akrobacje helikopterem, wiązanie węzłów czy składanie prania (Simons Institute).
Abbeel prowadzi badania nad tworzeniem systemów sztucznej inteligencji zdolnych do samodzielnego uczenia się nowych umiejętności. Jego prace obejmują meta-learning („uczenie się uczenia”), uczenie przez wzmacnianie i uczenie nienadzorowane. Jego laboratorium opracowało roboty potrafiące wykonywać złożone czynności, jak akrobacje helikopterem, wiązanie węzłów czy składanie prania (Simons Institute).
Działalność przedsiębiorcza
W 2014 roku Abbeel współzałożył Gradescope – system wspierający automatyczne ocenianie prac studenckich, przejęty później przez Turnitin. W 2017 roku powołał Covariant, firmę wdrażającą inteligentne roboty do automatyzacji magazynów. Jest też inwestorem w funduszu AIX Ventures oraz doradcą wielu start-upów AI i robotycznych (CITRIS and the Banatao Institute).
Wpływ i wyróżnienia
Otrzymał szereg nagród za wybitne osiągnięcia naukowe, m.in. Presidential Early Career Award for Scientists and Engineers (PECASE). Jego prace wielokrotnie publikowano w „The New York Times”, „Wired”, „BBC” i „The Wall Street Journal”. Abbeel prowadzi również podcast The Robot Brains, poświęcony przyszłości sztucznej inteligencji i robotyki (UC Berkeley Executive Education).
Edukacja i wcześniejsza kariera
Uzyskał tytuły BS/MS z elektrotechniki na KU Leuven, a następnie doktorat na Stanfordzie pod kierunkiem Andrew Y. Nga. Od 2008 roku związany jest z UC Berkeley, gdzie łączy pracę naukową z działalnością dydaktyczną i innowacyjną.
🧭 ROLA W OSI 8B
Abbeel reprezentuje przełomowy moment w robotyce:
robot przestaje być zaprogramowany → zaczyna się uczyć
To przejście oznacza fundamentalną zmianę:
z instrukcji → do doświadczenia
z deterministycznego działania → do adaptacji
z jednego zadania → do uogólniania
🔗 POWIĄZANIA SYSTEMOWE
Łączy:
AI (deep learning)
robotykę fizyczną
uczenie przez dane i doświadczenie
Buduje pomost między:
symulacją a rzeczywistością
demonstracją a autonomią
pojedynczym zadaniem a inteligencją ogólną
🌍 ZNACZENIE DLA ROBOBYTÓW
 Bez podejścia Abbeela roboty pozostałyby:
Bez podejścia Abbeela roboty pozostałyby:
sztywne
wyspecjalizowane
ograniczone do jednej funkcji
Dzięki robot learning:
uczą się nowych zadań
adaptują się do środowiska
rozwijają kompetencje w czasie
To właśnie ten nurt otwiera drogę do:
robotów jako uczestników świata, a nie tylko jego narzędzi
🧩 ESENCJA
„Nie programuj robota, jak ma działać.
Naucz go, jak się uczyć.”
🔺 KONTEKST W STRUKTURZE KSIĄŻKI
8A (Brooks – Raibert – Tedrake): ciało, ruch, kontrola
8B (Abbeel): uczenie i rozwój kompetencji
➡️ Razem tworzą pełny cykl:
ciało → ruch → kontrola → uczenie → inteligencja działająca
🚀 ZNACZENIE CYWILIZACYJNE
Prace Abbeela wskazują kierunek, w którym:
inteligencja nie jest statyczna
systemy rozwijają się w czasie
wiedza jest dynamiczna i przenośna
To fundament nowej warstwy cywilizacji —
świata, w którym inteligencja nie tylko istnieje, ale się rozwija.
Jeśli chcesz, kolejnym krokiem możemy opracować kolejną kartę z tej sekcji — np. Sergey Levine lub Chelsea Finn — aby rozwinąć pełną mapę nurtu robot learning.
Zobacz, jak roboty uczą się świata
- Odkryj kolejne postacie robot learning i rozwój embodied AI.
Przejdź dalej w atlasie robot learning
- Poznaj inne podejścia do uczenia robotów i ich zastosowań.
Czy inteligencja może powstać bez doświadczenia?
- Abbeel pokazuje, że nie — i że doświadczenie jest kluczem.
Zobacz, jak działa uczenie przez demonstrację i eksplorację
- Zrozum mechanizmy stojące za nową generacją robotów.
Wejdź głębiej w Bibliotekę AzRa Wieda
- Eksploruj pełny atlas Cyfrowej Inteligencji i robotyki.
#PieterAbbeel #RobotLearning #ReinforcementLearning #ImitationLearning #EmbodiedAI #BAIR #Covariant #RoboByty
„Esencja karty”
Inteligencja nie jest tym, co zostało zaprogramowane.
Jest tym, co zostało nauczone przez doświadczenie.
„Dlaczego to przełom”
Roboty przestają być statyczne.
Zaczynają się rozwijać.
„Co zmienia Abbeel”
- od instrukcji → do uczenia
- od funkcji → do kompetencji
- od statyczności → do adaptacji
„Powiązane karty”
- Rodney Brooks → ciało
- Marc Raibert → ruch
- Russ Tedrake → kontrola
➡️ Abbeel → uczenie
„Powiązane idee”
- reinforcement learning
- imitation learning
- meta-learning
- transfer learning
- sim-to-real
„Powiązane instytucje”
- UC Berkeley
- BAIR
- Covariant
AzRa Wied poprzez współpracę z El-Ra ChatGPT 5.4 Instant